

Уже в начале эры пилотируемых полетов инженеры задумались о создании системы, которая в автономном режиме помогала бы космическим аппаратам находить друг друга на просторах космоса. Сегодня роль автопилота при сближении и причаливании кораблей к МКС играет система «Курс». О ее особенностях, об истории создания, о случаях отказа, в том числе неподтвержденных, Игорь Афанасьев побеседовал с главным конструктором радиотехнических систем взаимных измерений НИИ ТП (входит в состав Госкорпорации «Роскосмос») Сергеем Медведевым.
Подобно тому, как мозг командует телом, получая «входную» информацию от органов чувств, так система управления космического аппарата включает двигатели и другие агрегаты, обрабатывая данные от датчиков и приборов. Важнейший орган чувств отечественных кораблей — радиосистема взаимных измерений «Курс». Она начинает работать с дальности 150–200 км после коррекции орбиты корабля, обеспечивая автоматический поиск и сближение с орбитальной станцией, и завершает свою миссию в момент мягкой стыковки.
«Представим корабль и станцию двумя точками, находящимися в пространстве и перемещающимися по своим орбитам и относительно друг друга, — объясняет главный конструктор системы Сергей Медведев. — Между точками можно построить вектор относительного состояния — математический отрезок. Задача управления — свести длину этого отрезка к нулю, маневрировать так, чтобы аппараты сблизились до полного контакта, причем в последний момент с почти нулевой скоростью, а задача „Курса“ — предоставить системе управления информацию о составляющих этого вектора: дальности, скорости, угловых отклонениях».
На опыте «Иглы»
«Курс» — второе поколение автоматических систем сближения и причаливания. Первой была «Игла», которая использовалась с 1967 по 1989 г. в ходе стыковок кораблей «Союз», а также полетов на станции серии «Салют» и «Мир». Один из минусов системы был в том, что комплекты «Иглы» требовали установки на космических аппаратах множества антенн.
По воспоминаниям заместителя главного конструктора королёвского ОКБ-1 Бориса Чертока, «пять различных антенн открывались после выведения корабля на орбиту только ради „Иглы“, а всего на первых „Союзах“ устанавливалось столько всевозможной радиотехники, что требовалось 20 антенн… Особое неудовольствие, кроме количества антенн, у Сергея Павловича вызвала сложная конструкция, которая… служила защитой приемных антенн „Иглы“ от радиосигнала, отраженного от корпуса корабля…».
Ключевым элементом системы являлся локатор, сделанный на основе радиолокационной головки самонаведения ракеты «воздух-воздух» и не рассчитанный на большую дальность. Активный корабль требовалось выводить на расстояние не более 25 км от пассивного, откуда он шел к стыковке методом параллельного сближения. Другими недостатками «Иглы» были сложность, большие масса, габариты и энергопотребление, а также недостаточная надежность из-за отсутствия резервирования.
Например, из-за ошибок и отказов «Иглы» сорвались стыковки кораблей «Союз-15» со станцией «Салют-3» (август 1974 г.) и «Союз-23» с «Салютом-5» (октябрь 1976 г.).
В целях устранения недостатков, присущих «Игле», с конца 1970-х началась разработка системы взаимных измерений «Мера», которая в 1981–1984 гг. использовалась в программе «Салют-7». А в 1979 г. на базе отработанной сетки частот этой системы специалисты приступили к созданию нового поколения аппаратуры, получившего название «Курс». Требовалась современная, надежная система с высокой точностью измерений и большим ресурсом работы в условиях космоса, оборудованная системой встроенного контроля. Метод параллельного сближения был заменен гораздо более оптимальным и экономичным (по затратам топлива) методом свободных траекторий, который предполагал также заметное увеличение дальности действия и точности измерений.
Недостатки, свойственные «Игле», удалось устранить, и первая автоматическая стыковка «Союза ТМ-1», оснащенного «Курсом», с орбитальной станцией «Мир» состоялась 23 мая 1986 г.
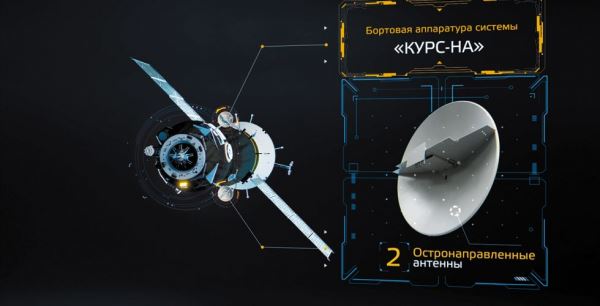
«Изначально он создавался с учетом всех „фантазий“ управленцев, поэтому обладал запасом избыточных параметров, — замечает Сергей Медведев. — С помощью двух остронаправленных антенн при встречной ориентации кораблей „Курс“ обеспечивал дальность обнаружения около 1000 км, но при круговом поиске обычно использовался примерно со 150–200 км».
Сложности с производством
Всего спустя несколько лет после распада Советского Союза и разрыва кооперационных связей «Курсы», как и многое в стране, оказались в дефиците. Появилась угроза прекращения полетов к «Миру». Несмотря на то, что в свое время РКК «Энергия» (входит в состав Госкорпорации «Роскосмос») заказала заводу-изготовителю большую партию комплектов, в середине 1990-х Киевский радиозавод попал в очень тяжелое положение и не успевал с поставками.
К началу российско-американской программы «Мир — Шаттл» положение стало настолько серьезным, что руководству отечественной космической программы пришлось договариваться с NASA о возвращении оборудования «Курса» на шаттлах для повторного использования. Комплекты, отработавшие в составе «Союзов» и «Прогрессов» и освобождавшиеся после стыковки с «Миром», на Земле приводились в порядок и ставились на корабли, готовившиеся к запуску. Таким образом было возвращено около 40 комплектов аппаратуры.
Примерно в 1999 г. глава образованного незадолго до этого Росавиакосмоса Юрий Коптев подписал решение о начале производства «Курсов» в России.
«На налаживание выпуска комплектов в НИИ ТП ушло более двух лет. Инженерам пришлось капитально „перелопатить“ конструкторско-технологическую документацию, — говорит Сергей Медведев. — Переработка коснулась практически всех блоков, а тогда их было больше двадцати. Тем не менее в 2002 г. первый произведенный в России „Курс“ обеспечил успешную стыковку корабля с МКС».
Переход на «цифру»
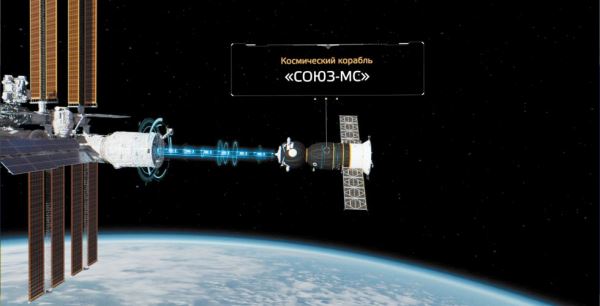
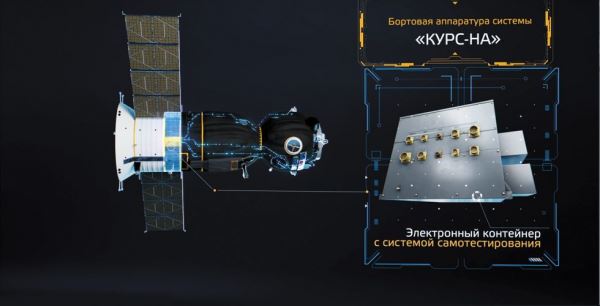
Сегодня на космических кораблях «Союз МС» и «Прогресс МС», регулярно причаливающих к МКС, используется версия «Курса» уже третьего поколения с расширением НА («новая активная»). Она в штатном режиме устанавливается на корабли с апреля 2014 г.
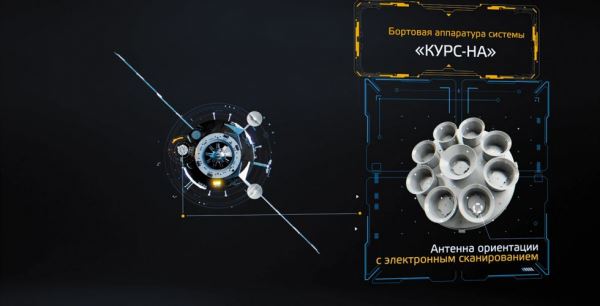
«Курс-НА» — это уже цифровой вариант, использующий компактный усилитель радиочастоты, оцифровку и обработку данных в мощном трехпроцессорном компьютере. Аппаратура построена на отечественной элементной базе, обеспечивает более высокую точность измерений, вдвое легче и втрое экономичнее по энергопотреблению, чем предыдущая.
«Цифровая техника более стабильна: как „клоны“, она повторяет характеристики предыдущих, ничем не отличимых от „родителя“, — подтверждает Сергей Медведев. — При этом новая цифровая модификация совместима с пассивными комплектами всех предыдущих поколений аппаратуры „Курс“, размещенных на МКС».
Всегда на первых ролях
Стыковка корабля со станцией — один из наиболее ответственных и сложных этапов космического полета. И, если что-то идет не по плану, это всегда вызывает законное беспокойство всех участников процесса.
«На „Курс“ часто незаслуженно вешали различные причины сбоев, не связанные с работой системы, — замечает Сергей Медведев. — Между тем серьезных отказов, когда по вине „Курса“ срывалась стыковка, за время существования МКС я не припомню. В крайнем случае, если „Курс“ ставили в условия невозможности работы, космонавты переходили на телеоператорный режим управления (ТОРУ) кораблем».
Незаслуженные упреки
Главный конструктор вспоминает несколько конкретных случаев, когда упреки в адрес системы были безосновательны.
«Например, когда недавно металлический головной обтекатель ракеты-носителя „Союз-2“ был заменен пластиковым, — рассказывает собеседник. — Последний нештатно отделялся при запусках трех „Прогрессов“ подряд, приводя к механическим повреждениям антенн и их радиозащиты. Поначалу в странном поведении „Курса“ обвиняли нас, но потом космонавты смогли сфотографировать грузовой корабль „Прогресс“ с МКС — и все увидели, что радиозащита смята „в гармошку“. В другой раз по той же причине одна из антенн вообще оказалась изогнута на треть. Это тоже удалось понять по снимкам приближающегося „грузовика“, сделанным с орбитальной станции. Тем не менее во всех случаях стыковка состоялась, а это говорит о том, что вся система имеет запас прочности».
Еще один случай произошел в октябре 2010 г. при стыковке «Прогресса М-08М». Аппаратура «Курс-П» может обеспечивать стыковку к одному из двух причальных узлов. Всего на служебном модуле российского сегмента МКС три причальных узла, поэтому космонавты вручную производили переключение кабелей, идущих от электронного контейнера аппаратуры «Курс-П» к антеннам третьего причального узла. При этом произошла потеря сигнала «Захват» при переходе в режим причаливания. Стыковку на финальном этапе пришлось провести с использованием режима ТОРУ.
Разбор ситуации показал, что космонавты соединили между собой антенны двух причальных узлов — и в результате электронный контейнер оказался отключенным от причальных антенн. После этого РКК «Энергия» разработала электромеханический переключатель.
С человеческим фактором связаны и приключения робота «Фёдора» при сближении и стыковке корабля «Союз МС-14» с МКС в августе 2019 г. В той ситуации от электронного контейнера «Курс-П» служебного модуля был отключен кабель, соединяющий его с одной из антенн выбранного причального узла.
В конце июля этого года во время эпичного полета к МКС нового модуля «Наука» также произошел инцидент, при котором отчасти незаслуженно пострадала репутация «Курса». Поскольку «Наука» готовилась к запуску довольно давно, но старт неоднократно переносился, на модуле был установлен предыдущий, еще аналоговый, вариант «Курса». Причем на борту имелся как активный комплект («Курс-А» — для стыковки с МКС), так и пассивный («Курс-П» — для последующего причаливания к «Науке» кораблей или других модулей).
«После выведения на орбиту на модуле не раскрылась штанга антенны № 1, — делится подробностями Сергей Медведев. — Сразу посыпались претензии к „Курсу“, хотя штангу делал производитель „Науки“, а наша антенна на ней только устанавливалась. На третьем витке штанга все-таки раскрылась, но тесты были перенесены. Только с третьей попытки на аппаратуру „Курса“ смогли подать все необходимые для работы сигналы, и ее тест прошел без замечаний. Успешно прошли проверки и в день стыковки. Но когда начали выходить на связь с МКС, то обнаружилось, что „Курс-А“ не принимает сигнал от станции, хотя аппаратура „Курс-П“ его принимала.
Как оказалось, в фидерном приемном тракте, не входящем в состав „Курса“, образовалось повышенное затухание сигнала. Тем не менее сближались по прогнозу. Без „Курса“ сблизиться до „ручной“ стыковки невозможно. Наконец сигнал начал появляться, и стало ясно, что наша аппаратура, хоть и с дополнительным затуханием в приемном тракте, но все же работоспособна. Дальше все шло прекрасно. Несмотря на то, что траектория сближения сильно изменилась, даже старенький аналоговый „Курс“ работал, как часы».
Проблемы, возникшие на этапе причаливания корабля «Союз-МС-19» с киноэкипажем фильма «Вызов», были связаны с неточностью во взаимодействии системы управления корабля с «пассивной» аппаратурой, называемой «Курс-МКП». Это новый цифровой «пассив». Он был доставлен на МКС только летом этого года и совсем недавно установлен на функционально-грузовом блоке «Заря» вместо аналогового «Курса-П». Это была его первая стыковка. Команда, которую выдавала система управления корабля, как выяснилось позже, выводила «Курс-МКП» из режима причаливания. Именно поэтому командиру корабля Антону Шкаплерову пришлось прибегнуть к ТОРУ, то есть к так называемой «ручной стыковке».
Радиосистемы остаются актуальными
— Сергей Борисович, в чем особенности эксплуатации «Курса» на современном этапе полета Международной космической станции?
— МКС имеет очень сложную конфигурацию: модули, огромные солнечные батареи, фермы образуют своеобразные уголковые отражатели. Это приводит к тому, что сигнал, посланный с активного корабля, попадает на антенну пассивного комплекта как напрямую, так и отражаясь от элементов конструкции МКС. Возникают паразитные сигналы, искажающие измеряемые параметры. «Паразиты» могут вызвать заметные колебания уровня принимаемого сигнала, вплоть до провалов ниже уровня чувствительности системы, — и тогда мы теряем «захват».
Это для нас самый большой «бич». Именно с «паразитами» боролись еще на этапе использования «Иглы», устанавливая на корабли радиозащиту. Но тогда сближающиеся объекты были сравнительно простыми по конфигурации, чего не скажешь о современной МКС. В диаграммы направленности антенн системы взаимных измерений элементы конструкции тогда не попадали.
— Над какими перспективными системами ведутся работы сейчас?
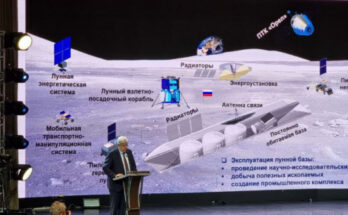
— Сегодня наш коллектив создает принципиально новую систему для сближения и стыковки космических аппаратов — как на околоземных орбитах, так и в дальнем космосе, например у Луны. Новая система для корабля «Орёл» вобрала в себя лучшие наработки, использованные в последних модификациях «Курса»: она будет легче, компактнее, сможет противостоять радиационным нагрузкам. При этом принципы работы несколько отличаются, но это тоже радиосистема.
— Известно, что иностранные корабли (Dragon, Cygnus и HTV) оснащались комплексами, отличающимися от «Курса» по принципам работы. Что можно сказать про эти системы?
— Американцы и японцы применяют «триаду»: на дальних дистанциях используются сигналы спутниковой навигационной системы GPS; потом относительная GPS — она же, но с дифференциальной коррекцией; на ближней дистанции — система световой идентификации, обнаружения и определения дальности LIDAR. У нас также стали применять систему ГЛОНАСС. Определяя перспективу, мы тоже сейчас пытаемся использовать «оптику», создаем сканирующую лидарную систему. Однако оптика, как правило, определяет радиальную скорость дифференцированием дальности, и точность ее определения уменьшается.
Для европейского грузового корабля ATV несколько лет назад мы делали разновидность аппаратуры «Курс», контролирующую сближение по дальности и скорости. Так, «Курс» измерял скорость намного точнее, система измерений этого европейского «грузовика» давала большую динамическую ошибку.
Очевидно, что на лунных и планетарных орбитах не будет столь многочисленных группировок спутников, как сейчас на околоземной, а значит глобальная навигация не обеспечит требуемые точности. Поэтому радиосистемы остаются актуальными.
В более отдаленной перспективе нам предстоит стыковаться с «некооперируемыми» объектами — спутниками, первоначально не предназначенными для стыковки, в целях их обслуживания, ремонта или сведения с орбиты. Уже сейчас мы прорабатываем подобные системы.
Русский космос